Diffusion’s key insight: destroying structure is easy (add noise), creating structure is hard. Learn to reverse the easy process → generate from scratch.
Part 3 of 7 in the Diffusion Models series.
Forward process
Gradually add Gaussian noise over T timesteps:
$$q(x_t | x_{t-1}) = \mathcal{N}(x_t; \sqrt{1-\beta_t}x_{t-1}, \beta_t I)$$
β_t is noise schedule. Small values (0.0001 to 0.02).
After T steps (T~1000), image becomes pure noise.
Interactive demo: Flow Matching Animation
Closed-form sampling
Don’t need to iterate. Sample x_t directly from x_0:
$$q(x_t | x_0) = \mathcal{N}(x_t; \sqrt{\bar{\alpha}_t}x_0, (1-\bar{\alpha}_t)I)$$
Where $\bar{\alpha}t = \prod{s=1}^t (1-\beta_s)$
def q_sample(x_0, t, noise=None):
if noise is None:
noise = torch.randn_like(x_0)
sqrt_alpha_bar = sqrt_alpha_bar_schedule[t]
sqrt_one_minus_alpha_bar = sqrt_one_minus_alpha_bar_schedule[t]
return sqrt_alpha_bar * x_0 + sqrt_one_minus_alpha_bar * noise
Single operation: weighted sum of original image and noise.
Noise schedules
Linear: β increases linearly
betas = torch.linspace(0.0001, 0.02, T)
Cosine: Better for high resolution
def cosine_schedule(t, T, s=0.008):
f_t = np.cos((t/T + s)/(1+s) * np.pi/2)**2
return 1 - f_t / f_0
Schedule choice affects generation quality significantly.
Computing the schedule
def get_schedule(betas):
alphas = 1 - betas
alpha_bar = torch.cumprod(alphas, dim=0)
sqrt_alpha_bar = torch.sqrt(alpha_bar)
sqrt_one_minus_alpha_bar = torch.sqrt(1 - alpha_bar)
return sqrt_alpha_bar, sqrt_one_minus_alpha_bar
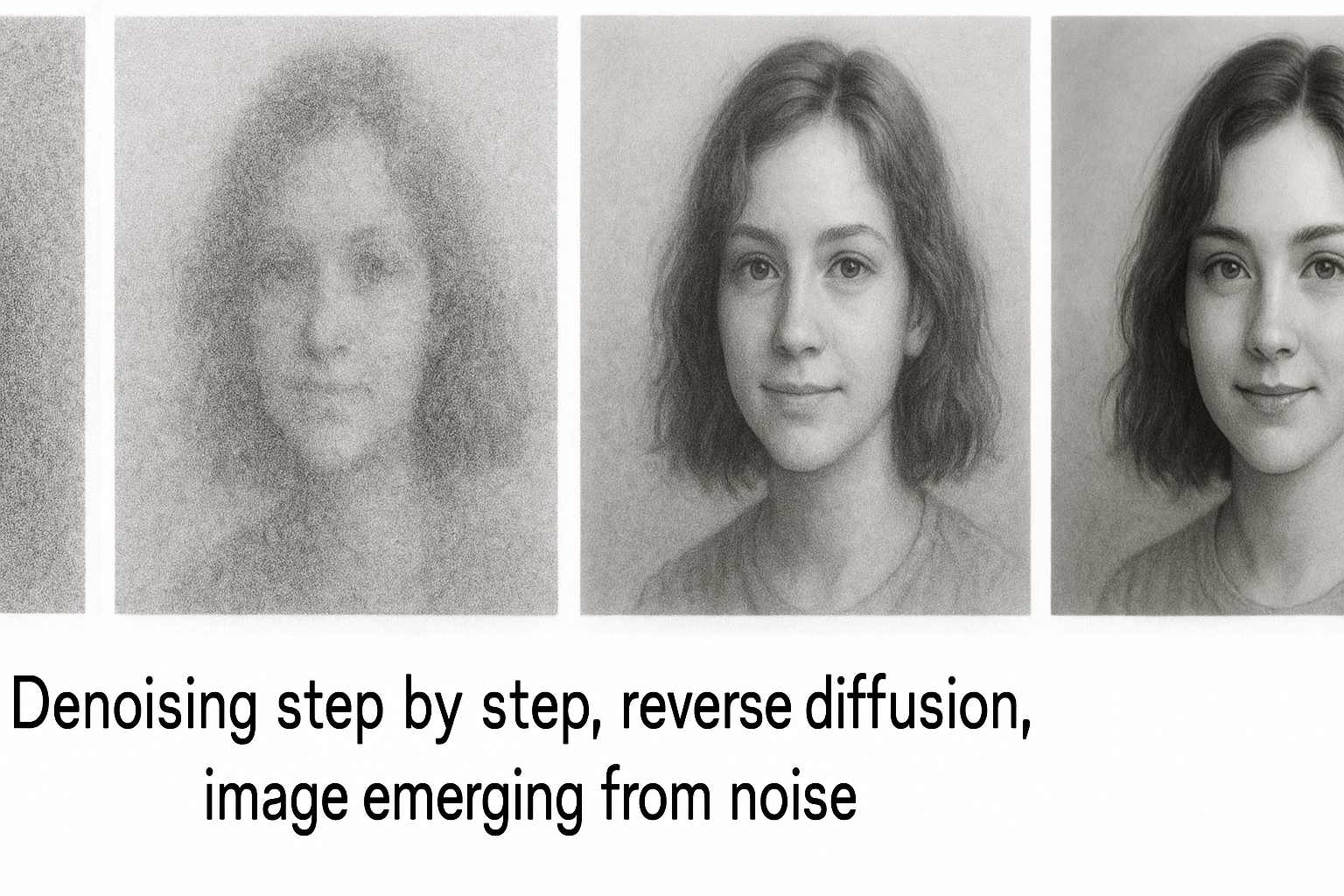
Reverse process
Learn to undo the noise:
$$p_\theta(x_{t-1}|x_t) = \mathcal{N}(x_{t-1}; \mu_\theta(x_t, t), \Sigma_\theta(x_t, t))$$
Neural network predicts mean (and optionally variance).
What does the network predict?
Three equivalent parameterizations:
1. Predict x_0: Network outputs: “What was the original clean image?”
2. Predict ε (noise): Network outputs: “What noise was added?” Most common. Simpler loss.
3. Predict v: $$v = \sqrt{\bar{\alpha}_t}\epsilon - \sqrt{1-\bar{\alpha}_t}x_0$$ Better for some applications.
Noise prediction loss
$$\mathcal{L} = \mathbb{E}{t, x_0, \epsilon}\left[|\epsilon - \epsilon\theta(x_t, t)|^2\right]$$
Simple MSE between true noise and predicted noise.
def diffusion_loss(model, x_0, t):
# Sample noise
noise = torch.randn_like(x_0)
# Get noisy image
x_t = q_sample(x_0, t, noise)
# Predict noise
predicted_noise = model(x_t, t)
# MSE loss
return F.mse_loss(predicted_noise, noise)
Training loop sketch
for batch in dataloader:
# Sample random timesteps
t = torch.randint(0, T, (batch_size,))
# Compute loss
loss = diffusion_loss(model, batch, t)
# Update
optimizer.zero_grad()
loss.backward()
optimizer.step()
Intuition
t=0: Image clean, no noise to predict → trivial t=T: All noise, original image gone → predict from prior Middle t: Partial noise → use image structure + noise statistics
Network learns different denoising strategies for different noise levels.
Noise schedules make sense? Give ML Animations a ⭐ and spread the word about this diffusion series!