Convolution followed by ReLU. This pattern repeats hundreds of times in modern image networks. Simple but there’s a reason it works.
The pattern
# Basic building block
conv = nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1)
relu = nn.ReLU()
output = relu(conv(input))
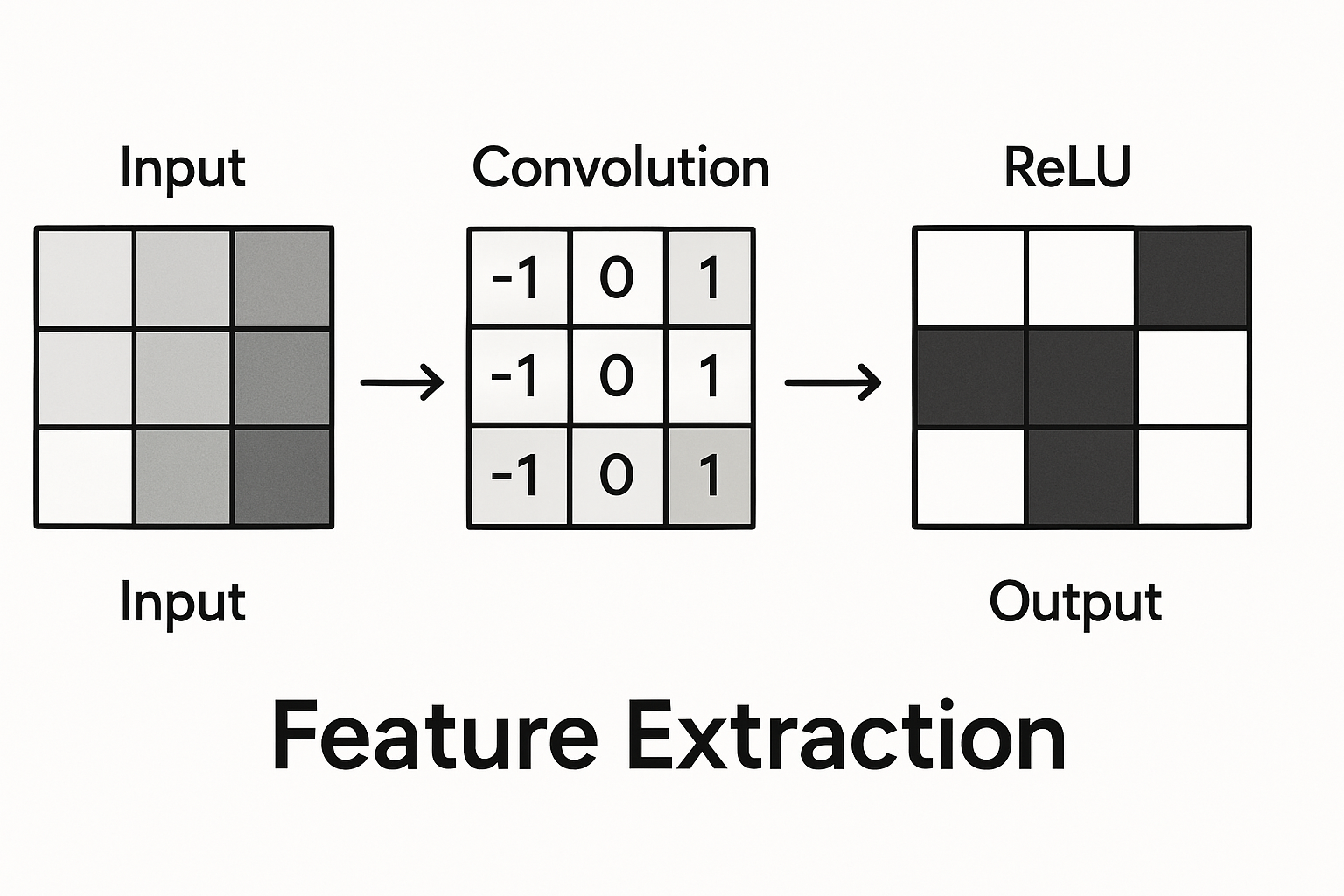
Conv extracts features. ReLU adds nonlinearity.
Interactive demo: Conv-ReLU Animation
Why ReLU after conv?
Convolution alone is linear. Stack of linear operations = one linear operation. No point going deep.
$$\text{Conv}_2(\text{Conv}1(x)) = \text{Conv}{combined}(x)$$
ReLU breaks linearity. Now deeper = more powerful.
What actually happens
- Conv: Weighted sum of local region. Detects patterns.
- ReLU: Keeps positive activations, zeros negative ones.
The “feature map” after ReLU shows where patterns were detected.
Negative activation = “not this pattern” Positive activation = “yes this pattern, this strongly”
Adding batch norm
Modern networks add batch normalization:
# Conv → BatchNorm → ReLU
nn.Sequential(
nn.Conv2d(64, 128, 3, padding=1),
nn.BatchNorm2d(128),
nn.ReLU()
)
Or sometimes:
# Conv → ReLU → BatchNorm
nn.Sequential(
nn.Conv2d(64, 128, 3, padding=1),
nn.ReLU(),
nn.BatchNorm2d(128)
)
Both work. First is more common.
In ResNet
ResNet uses this in blocks with skip connections:
class ResBlock(nn.Module):
def __init__(self, channels):
super().__init__()
self.conv1 = nn.Conv2d(channels, channels, 3, padding=1)
self.bn1 = nn.BatchNorm2d(channels)
self.conv2 = nn.Conv2d(channels, channels, 3, padding=1)
self.bn2 = nn.BatchNorm2d(channels)
def forward(self, x):
residual = x
out = F.relu(self.bn1(self.conv1(x)))
out = self.bn2(self.conv2(out))
out += residual # skip connection
out = F.relu(out)
return out
Note: ReLU after addition, not before.
What features look like
Early layers: edges, colors, simple textures Middle layers: parts, patterns, shapes Late layers: objects, concepts
ReLU essentially creates “feature detectors” that fire (positive) or don’t (zero).
Alternatives to ReLU
Same pattern works with other activations:
nn.Conv2d(...),
nn.LeakyReLU(0.1) # handles dead neurons
nn.Conv2d(...),
nn.GELU() # smoother, used in newer architectures
nn.Conv2d(...),
nn.SiLU() # Swish, self-gated
But ReLU still default for most CNN applications.
Conv + ReLU pattern locked in? Show support by starring ML Animations and sharing on your social channels!